





前言
近年來,機器人技術越來越多地在康復過程中被引入,目的是降低人工成本,加快恢復過程。由于大多數設備使用中,患者都是被動的,所以目前的技術挑戰就是建立能夠理解患者意圖并相應調整的交互控制功能,實現患者的主動參與。

機器人和患者之間的交互控制是康復機器人研究中非常重要的一個方面, 由于康復機器人是與運動功能受損的患肢相互作用, 而病人是具備自主運動意識的對象, 因此機器人和患者之間的交互控制不可或缺。首先, 交互控制會為患者創造一個安全、舒適、自然并且具備主動柔順性的訓練環境, 避免患肢由于痙攣、顫抖等異常的肌肉活動而與機器人產生對抗, 保護其不會受到二次損傷。其次, 交互控制會從傳感器信號中獲取患者的主動運動意圖, 鼓勵患者積極參與到運動中來, 實現所謂的主動訓練, 從而提高康復的效果。 根據獲取主動運動意圖時所使用的信號不同, 機器人與患者之間的交互控制策略可以基本分為兩類: 1) 基于力信號的控制方法; 2) 基于生物醫學信號的控制方法。
此文獻研究的方法是基于生物醫學EMG信號驅動的神經肌肉骨骼模型來計算肌肉動力和關節力矩。雖然這種方法很有前景,但收集EMG數據并不是一項簡單的工作,因為放置表面電極的肌肉需要專業的人員來選擇,并且EMG數據采集過程中可能會受到電磁干擾的影響。
此研究設計了一個EMG模型,該模型建立在一個普通康復運動的EMG數據的簡化實驗數據庫基礎上,以發展預測以任意速度執行的相同運動的EMG值的能力。報告的實驗結果比較符合期望,在EMG預測中顯示出了良好的準確性,從而使EMG驅動的神經肌肉骨骼模型成為可能。模型即使是通過重復的動作建立的,但也具有較好的適用性,可以簡化對活動康復設備的使用,使得病人的使用更加簡潔有效。
方法
受試者:5個(3男2女)自愿參與的受試者,年齡26±1.22,體重66±12.83 kg,身高1.7±0.089 m。均沒有對實驗動作有影響神經或者肌肉的協調問題。
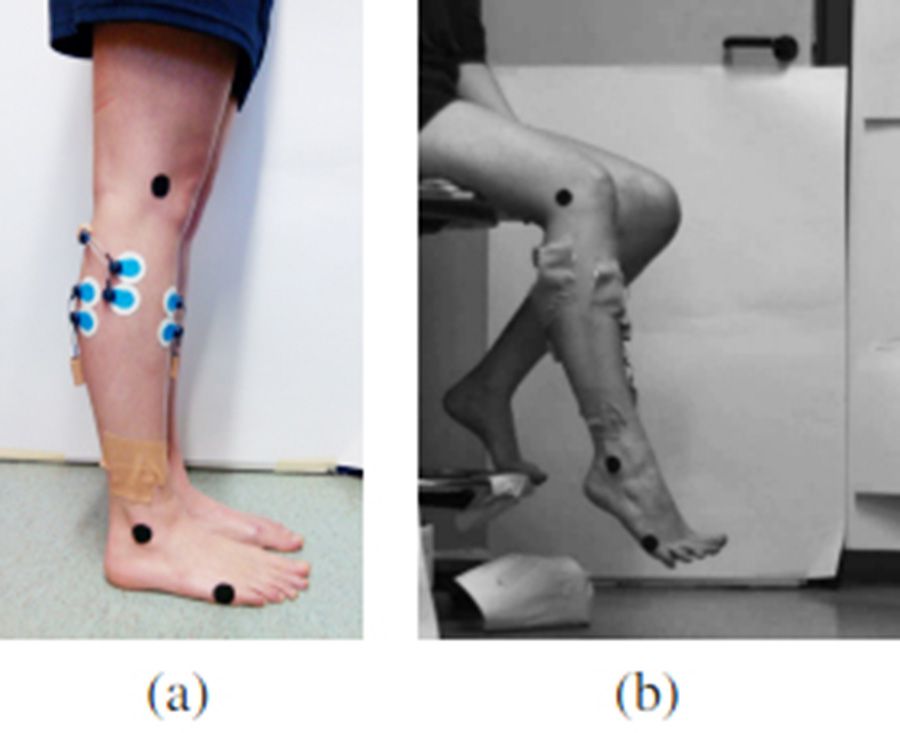
裝備:使用Cometa Wave wireless EMG系統來收集EMG信號,采集以下5塊肌肉的肌電:腓腸肌外側肌(GASL)、腓腸肌內側肌(GASM)、比目魚肌(SOL),腓骨長肌(PER)、脛前肌(TIB)。采集裝置的位置也按照相關研究的推薦位置來確定。
跖屈的動作通過相機記錄,3個循環標記點分別放在腓骨上端、外側踝和第五跖骨,如圖所示。
實驗步驟: 整個實驗步驟在實驗室內進行,所有受試者均在開始前接受過相同的動作指導,數據采集前,讓所有受試者坐在一個舒適的座椅上,足部不著地。然后,再讓受試者進行全范圍的踝關節跖屈,一組重復3次,總共進行9組。
開始的3組,要求動作緩慢進行(LC),之后再中速(MC),最后快速(HC)。測試中有使用節拍器,來減少各個組里各個動作的速度差異。收集不同頻率的動作旨在獲得一個較為全面的EMG模型,使得這個模型能夠應用在整個踝關節康復動作中。
額外的跖屈動作收集的數據被用來確認我們的數據模型的有效性。每個不同頻率至少進行3個額外組。另外再額外增加一個頻率(AC),介于快速和中速之間,同樣可增加此EMG模型的有效性。
數據采集:EMG信號的初始數據使用高通濾波進行過濾,矯正,在進行低通濾波過濾。此時EMG的數據就完成了標準化。各個肌肉的EMG信號峰值是由各個受試者的相同肌肉中提取出來的。踝關節角度由另一種儀器獲取,用來測出踝關節跖屈的角速度,從而確定跖屈動作的起止范圍。
EMG模型:預計的EMG模型是使用跖屈的平均速度的數據來預測踝關節運動的EMG值的。對于每個受試者,都建立了一個個人的包含3種動作頻率的EMG模型。每個頻率和每塊肌肉,EMG的平均曲線被首先計算出來,之后,每個肌肉的3種不同頻率的曲線,通過時間點來分離出1000個樣本,除去速度參數,來進行單獨的平均曲線計算。
這些各個肌肉的曲線可以用在相關的康復訓練或治療中,根據所需的頻率。根據時間的要求來完成一個完整的踝關節跖屈,每個平均EMG曲線都被預先計算過,來匹配任務要求的頻率,從而生成一個預計的EMG信號。
EMG模型有效性測試:使用皮爾遜相關指數R平方和均方根錯誤指數RMSE來評判。進行兩次檢測,第一次旨在評估此模型的準確性,收集同樣的頻率值下的跖屈肌肉信號值,輸入EMG模型中來進行測試。第二次測試旨在評估此模型預估EMG型號的準確性,使用不同的頻率下(AC)的運動EMG信號來進行測試。
結果
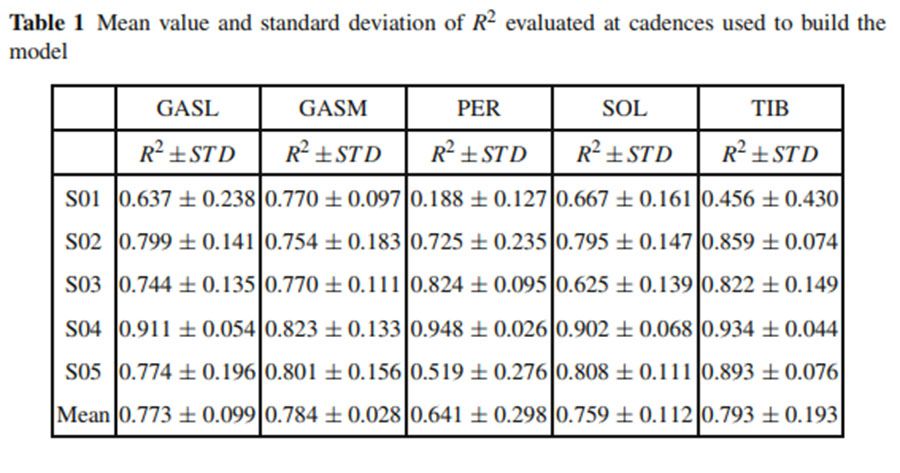
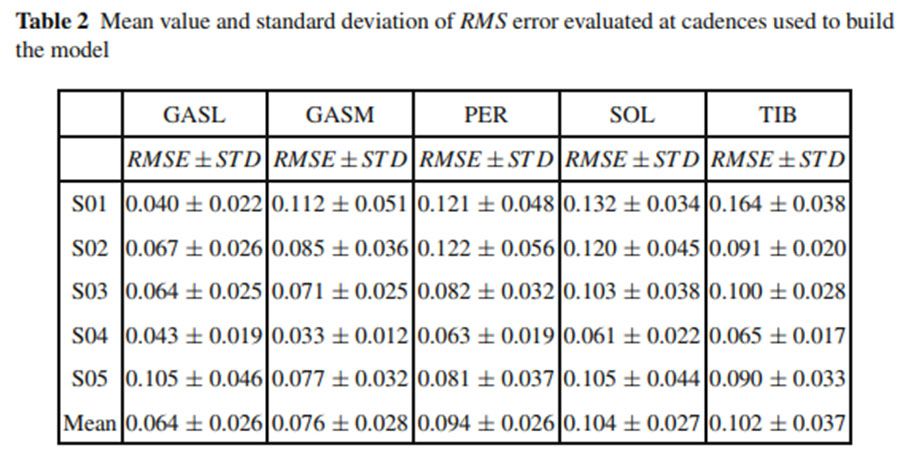
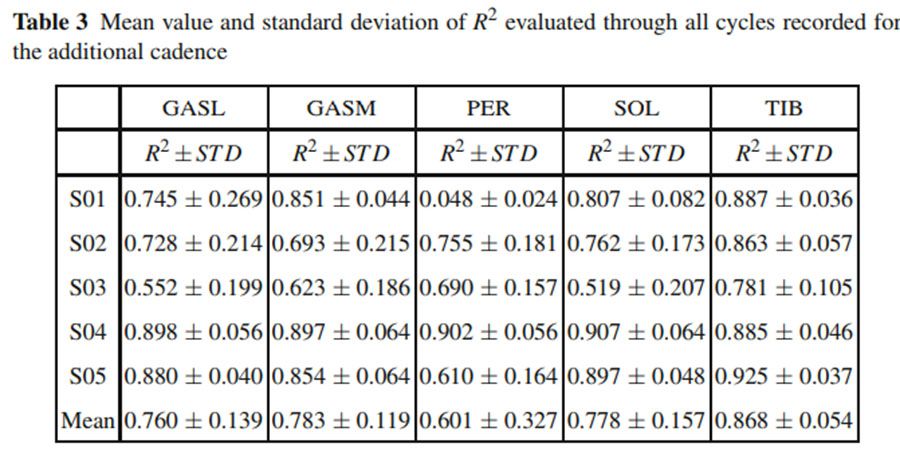
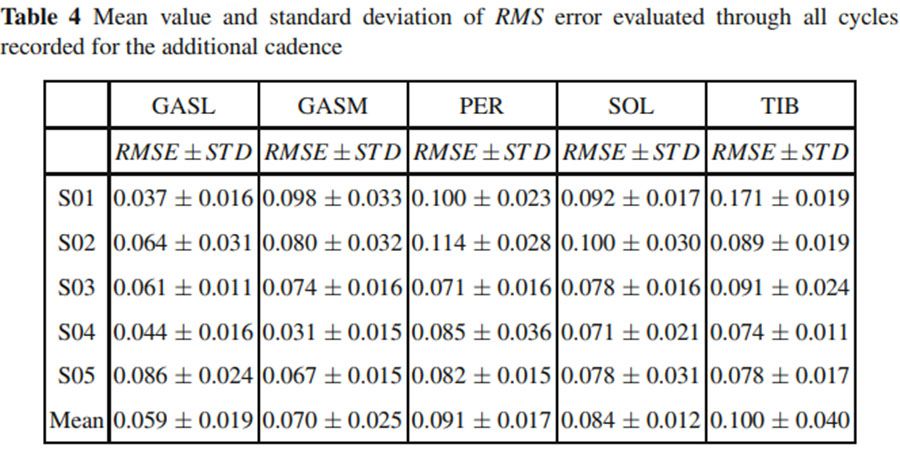
Tables1 和2都列出了從5個受試者肌肉中獲得的標準化EMG信號的R2 和RMSE值,整體的R2值是0.75,表明預測的曲線和實驗曲線是相關的。平均的RMSE值是0.088±0.022。第二次測試的結果如Tables3 和 4所示,和第一次的測試結果類似。
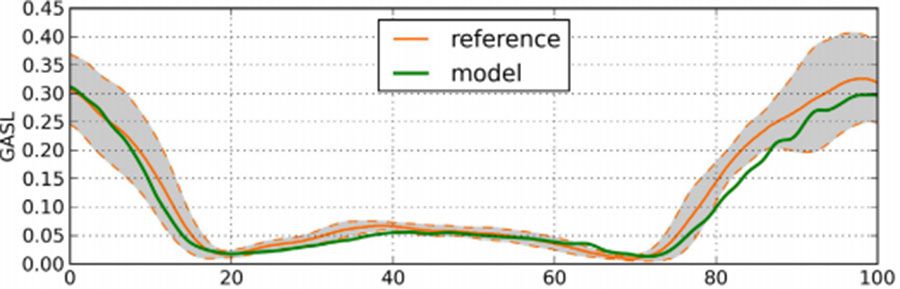
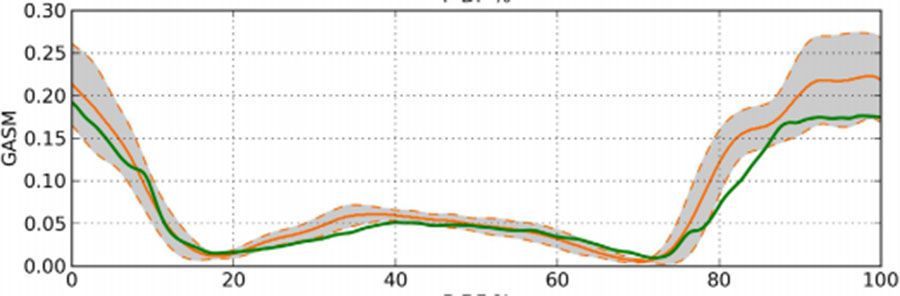
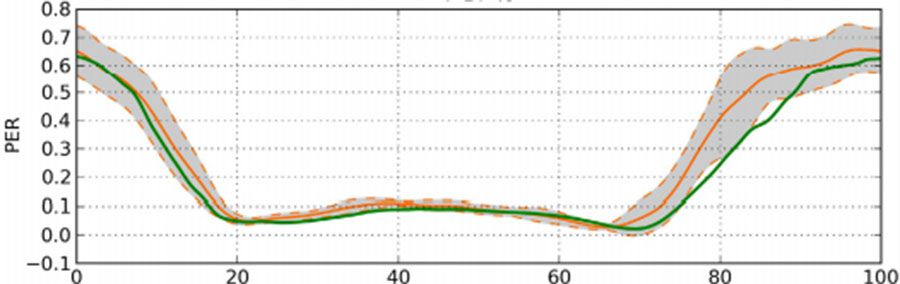
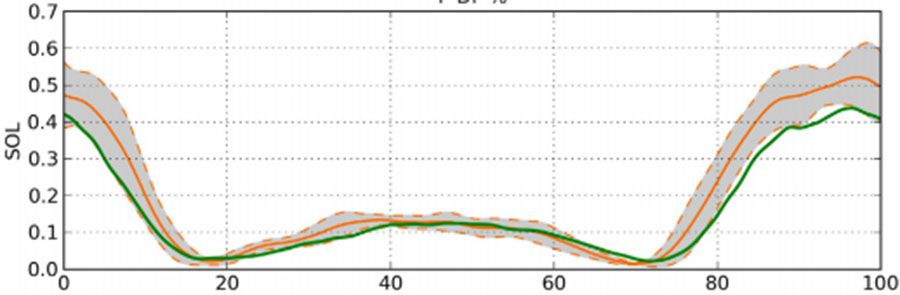
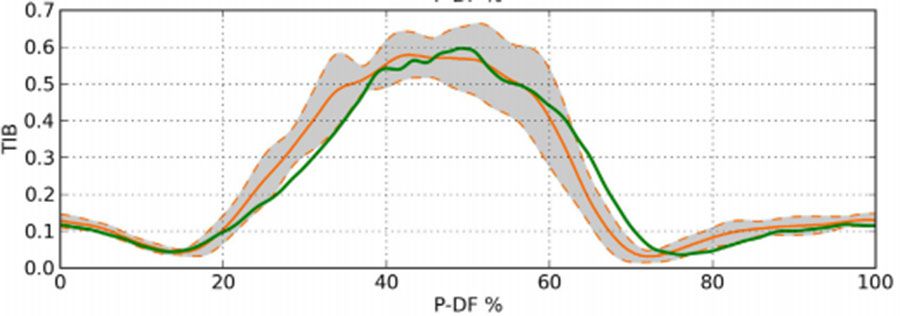
上圖為預測的EMG信號和測量的信號各個肌肉比較,橫坐標為跖屈的收縮百分比,數據均來自于4號受試者的AC頻率跖屈收縮,灰色區域為±標準差的參考范圍間隔區域,綠線為模型預測值。可以看出綠線基本落在灰色區域內,說明EMG模型預測能力較好。
結論
此研究第一次呈現了以5塊主要肌參與的跖屈運動EMG信號模型,并獲得了較為理想準確的研究結果。應用在損傷患者身上的相關研究也可以進行了,未來將會把研究中心放在建立矯正機器人的踝關節康復功能并且能夠簡便易行地應用在真正的病人身上。生物醫學信號正被逐漸應用于機器人和患者的交互控制,這種交互控制具有很大的靈活性,為完全癱瘓患者的主動訓練提供了潛在的可能方案,但由于生物醫學信號的隨機性高, 從中獲取準確的主動運動意圖是一項很大的挑戰。
免責聲明:部分圖片來源于網絡,版權不屬于我們,如有問題請立即聯系我們刪除。
